The 7th Hong Kong University Student Innovation and Entrepreneurship Competition
Awardees: YAN Wanquan
Award: Second Prize
Supervisor: Prof. CHENG Shing Shin
Project Short Description:
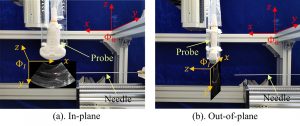
Percutaneous needle procedure is a basic step in minimally invasive surgery. The success rate of these operations can be significantly improved if the needle tip can be automatically tracked in real-time. Therefore, we developed the automated ultrasound guided needle tip tracking system.
The technical challenges of ultrasound-based tracking include:
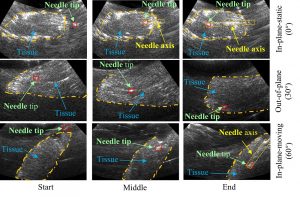
1). The dramatic change of the needle tip’s appearance.
2). Lots of artefacts and bright speckles in biological tissues’ images.
3). Occasional disappearance of the needle tip due to occlusions or misalignment.
To tackle these challenges, we propose to use a compressive tracking algorithm which has both generative and discriminative characteristics and allows the tracker to adapt to needle tip appearance changes and be able to discriminate the needle from noisy background. We also integrated a trajectory filter (Sage-Husa adaptive Kalman filter) to estimate the needle tip position when it disappears.
As the visual scope of ultrasound is limited, a visual servo approach (linear quadratic Gaussian control) was used to ensure the ultrasound probe robotically follow the needle tip’s movement.