Congratulations to our PhD graduate Zhou Panpan for receiving the 2021 IEEE CSS Beijing Chapter Young Author Prize at at the 40th Chinese Control Conference (CCC 2021)!
Project: Semi-global leader-following output consensus of discrete-time heterogeneous linear systems with position and rate-limited actuators via state feedback.
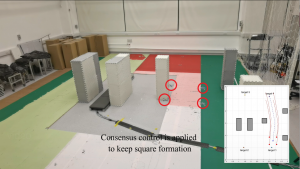
To solve the physical constraints and inter-vehicle collision avoidance of multi-agent systems, (i) We solve a semi-global leader-following output consensus problem for a class of heterogeneous multi-agent systems with input saturation and input rate saturation (which are directly related to the limits of velocity and acceleration in many physical systems including unmanned multicopters); and (ii) To resolve the issue of inter-agent collision that might occur in the consensus-based formation, we develop a general framework that combines the consensus-based formation control and motion planning strategies to achieve obstacle avoidance and avoidance of inter-agent collisions.