Congratulations to our PhD student Mr. ZHANG Moqiu for winning the Best Student Paper Award in the 2022 International Conference on Manipulation, Automation and Robotics at Small Scales (MARSS2022).
Project: A doppler and B-mode hybrid ultrasound tracking method for microcatheter navigation in noisy environments
Supervisor: Prof. ZHANG Li
Project Description:
Robot-assisted ultrasound imaging provides a promising tracking method for biomedical microrobot applications. However, accurate and robust localization in noisy biomedical environments is challenging. Noise artifacts such as interfaces or acoustic shadows influence the localization accuracy. Loss of view could happen when microrobots deviate from the 2D imaging plane. In this work, the authors propose a novel ultrasound tracking method that integrates Doppler and B-mode ultrasound imaging to realize accurate localization in noisy environments. A magnetic microcatheter is specifically designed for strong Doppler signal generation and drug delivery. To avoid loss of view, a bi-plane ultrasound tracking method that combines in-plane and out-of-plane tracking is proposed. Both in-vitro and in-vivo experiments validate the performance of the proposed tracking method. The results show that this work could provide a practical approach to navigating microcatheters in complex dynamic biomedical environments.
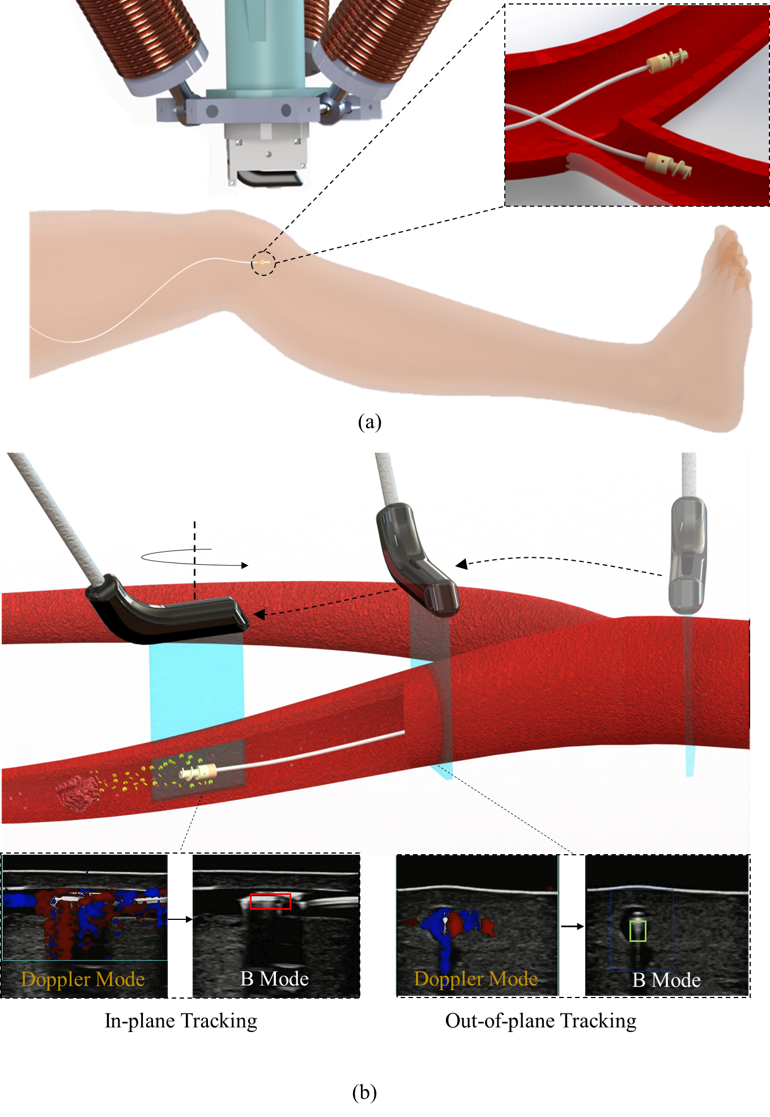
Concept of the proposed tracking method. A Doppler image-based noise filter can screen noise objects in B-mode images such as interfaces and acoustic shadows. The magnetic microcatheter is navigated toward the desired position robustly by switching between the in-plane and out-of-plane tracking modes. (a) Schematic drawing of the proposed system which includes a mobile electromagnetic magnetic system (eEMS), a 4-DoF controllable US probe and a customized magnetic catheter that can actively steer at bifurcation. The inset shows the proposed catheter can steer to the desired branch under the rotating magnetic field. (b) Schematic drawing of the proposed tracking method where in-plane tracking and out-of-plane tracking are controlled by the robot-assisted US probe and both Doppler images and B-mode images are used to track the microcatheter.
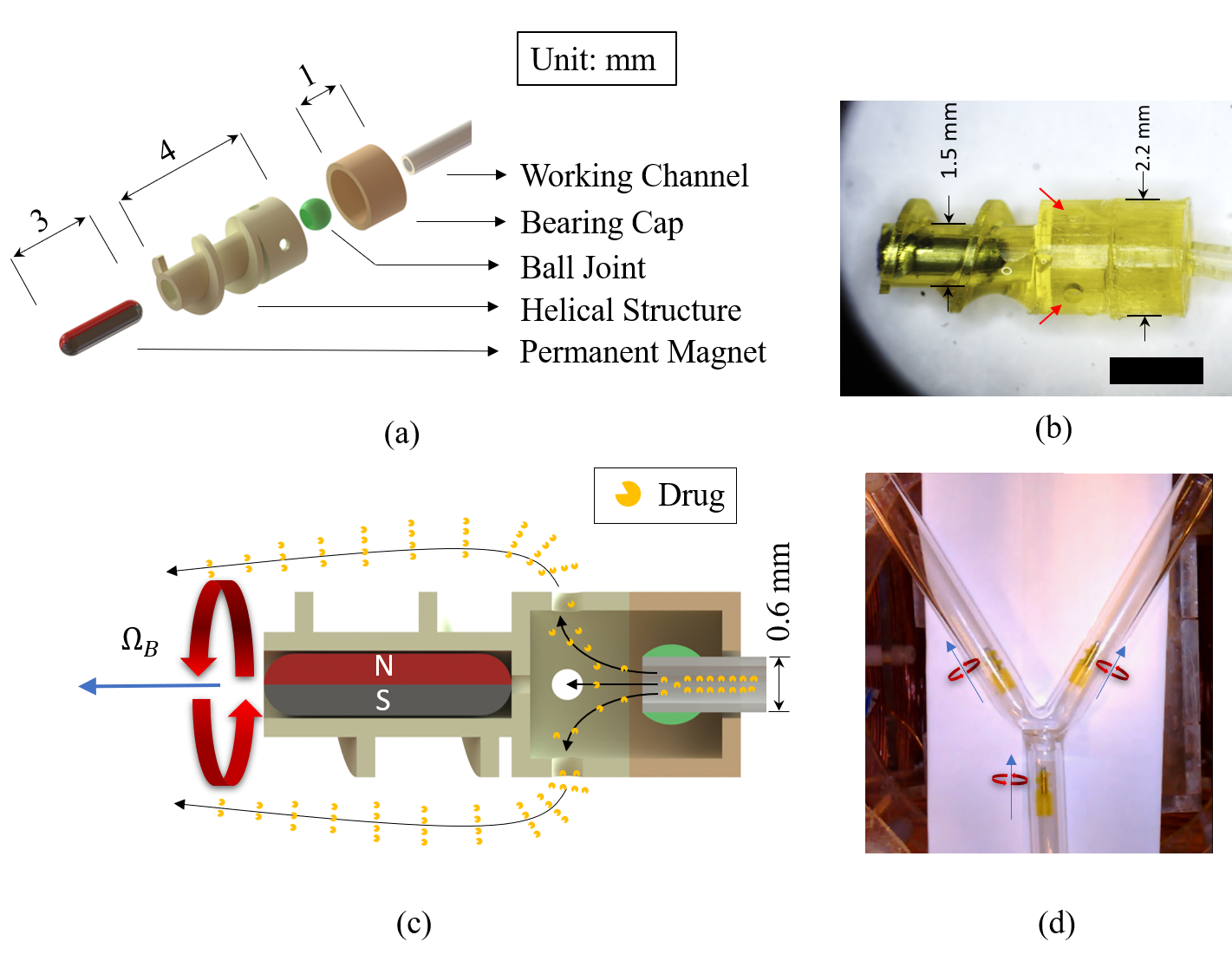
Design of the proposed magnetic microcatheter. (a) Explosion view of the catheter. (b) A 3-D printed prototype of the proposed catheter. The outlets for drug delivery are marked by red arrows. The scale bar is 2 mm. (c) The radial cross-section drawing of the catheter which shows the working principle of the drug delivery. The drug is released at the outlets and is propelled forward by the pumping flow generated by the rotation. (d) Verification test of the catheter that shows the catheter can steer to desired bifurcation under corresponding rotating magnetic field (marked by blue arrows).
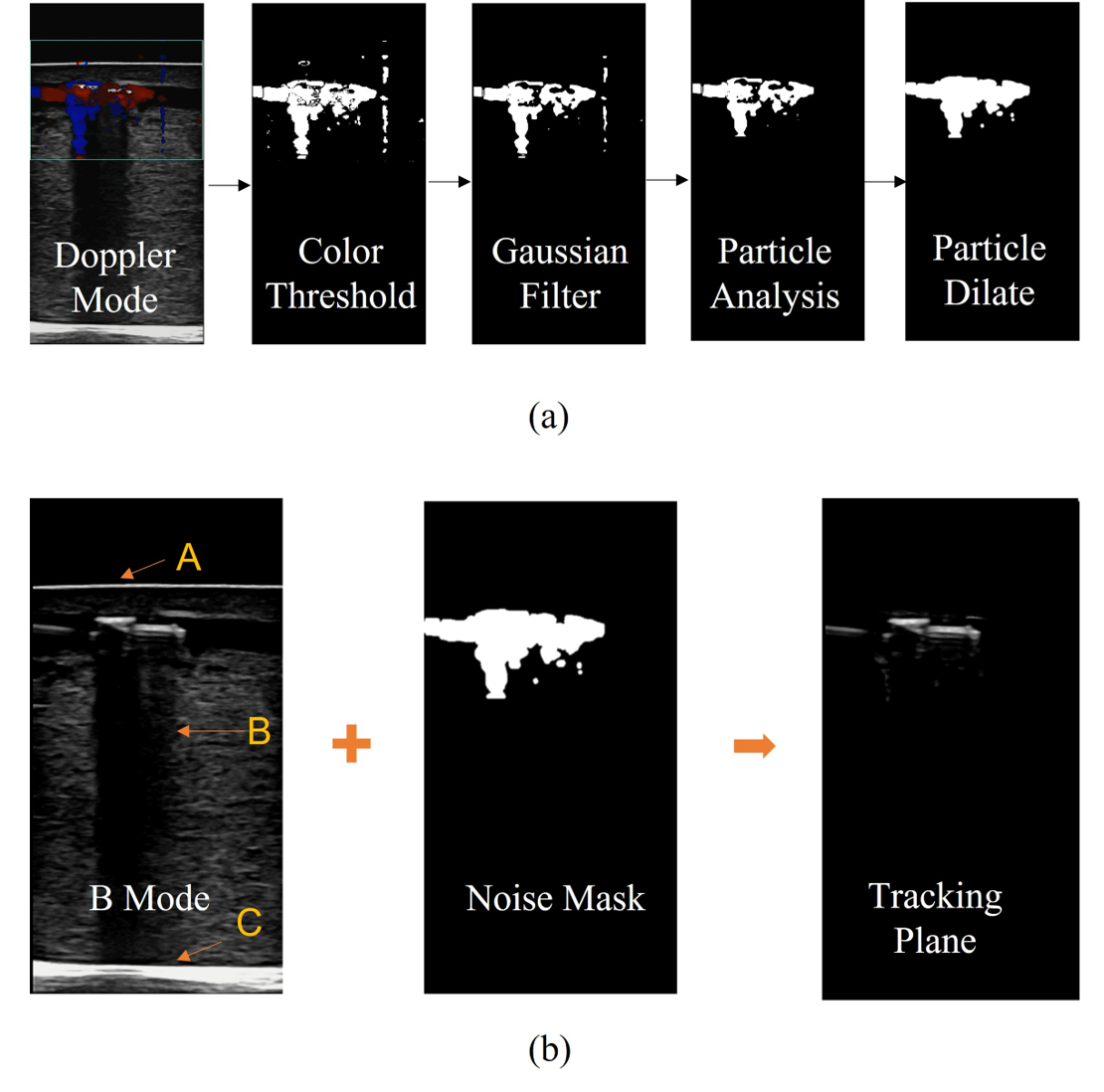
Principle of the Doppler image-based noise filter for ultrasound B-mode tracking. (a) The construction of the Doppler image-based noise filter which is designed to eliminate the noisy objects such as interfaces and acoustic shadows. (b) The process of filtering noise in B-mode image where the noise objects in the tracking plane is screened and the robot is localized in a clear background.
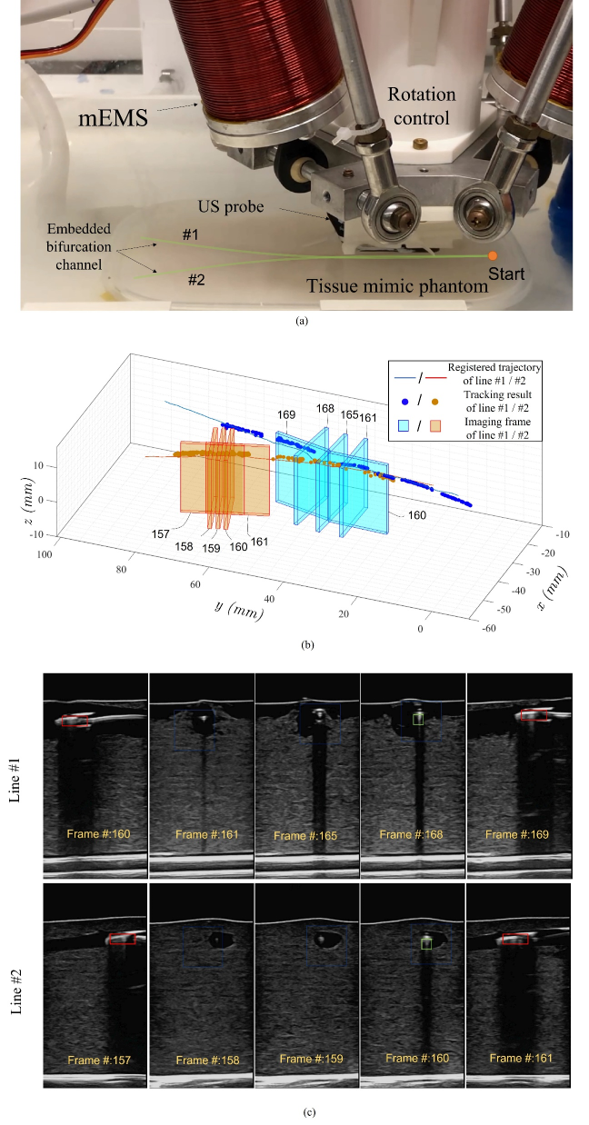
Experiment: Magnetic catheter navigation in tissue-mimicking agarose phantom. (a) Experiment setup that consists of a mobile Electromagnetic system (mEMS), 4-DOF controllable ultrasound probe and a tissue mimic phantom embedded with bifurcation channel. (b) Localization results with example frames and imaging planes. (c) Ultrasound images of the example frames which show the process of relocate the microcatheter by switching between in-plane and out-of-plane tacking modes.

Mr. ZHANG Moqiu attended the conference in Toronto, Canada.
Learn more about the conference: Click here!