The 2021 Professor Charles K. Kao Student Creativity Awards
The 7th Hong Kong University Student Innovation and Entrepreneurship Competition
Awardee: LIU Kangcheng
Award:
Third Prize in the 7th Hong Kong University Student Innovation and Entrepreneurship Competition
Merit Award in the 2021 Professor Charles K. Kao Student Creativity Awards
Supervisor: Prof. Ben CHEN
Project Short Description:
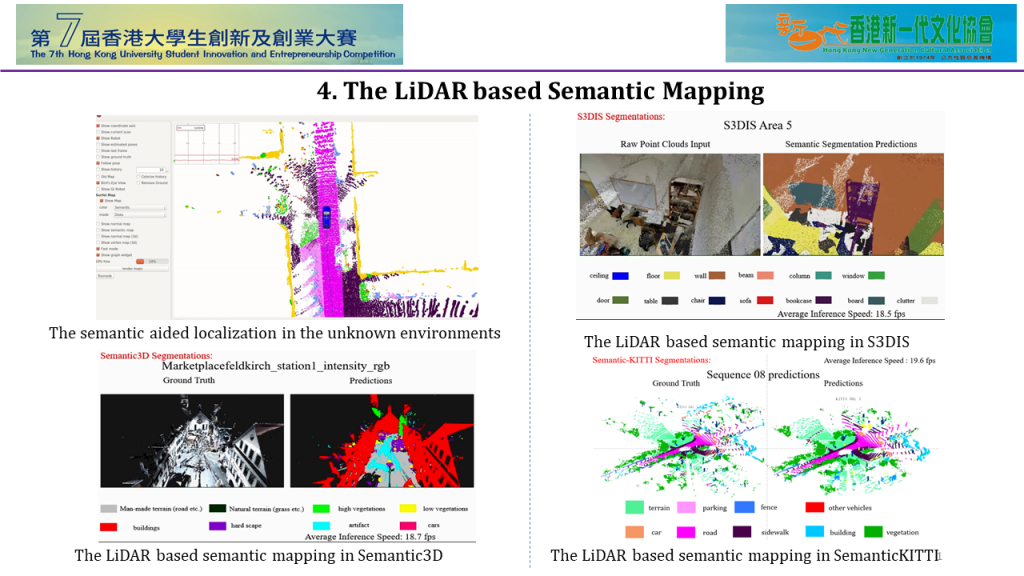
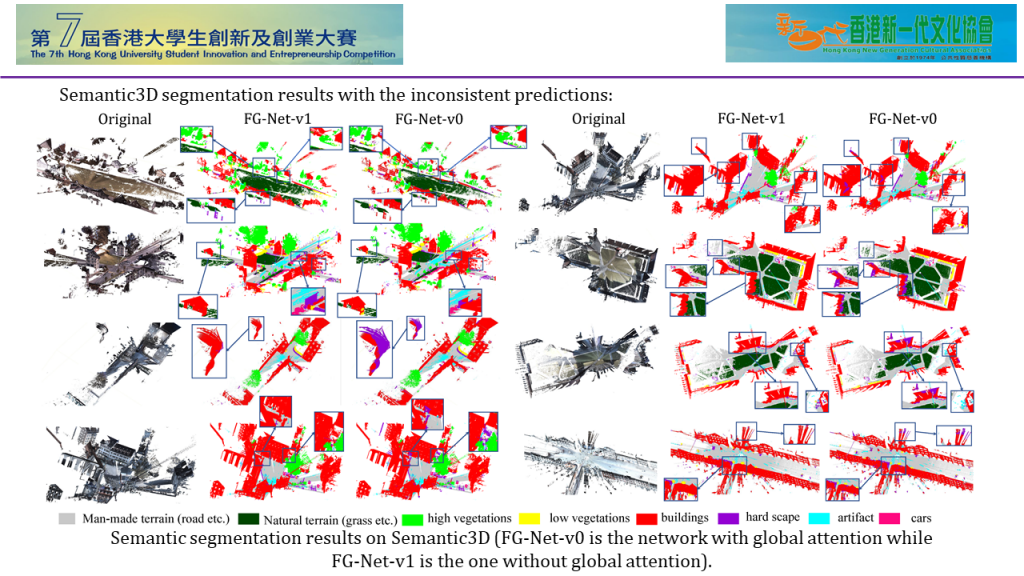
The first part of my work presents a general deep learning framework for large-scale point clouds understanding without voxelizations, called FG-Conv module, which achieves an accurate and real-time understanding of point clouds. We design feature level correlation mining and deformable convolutions based geometric aware modelling, which captures the local feature relationships and geometric patterns. Then, the attention mechanism is also adopted to enhance the global long-range feature correlations. Finally, the feature pyramid residual learning network is proposed to combine patterns at different resolutions in a memory-efficient way. Extensive experiments on real-world challenging datasets demonstrated that our approaches outperform state-of-the-art methods in terms of accuracy and efficiency. Weakly supervised transfer learning demonstrates the generalization capacity of our methods.
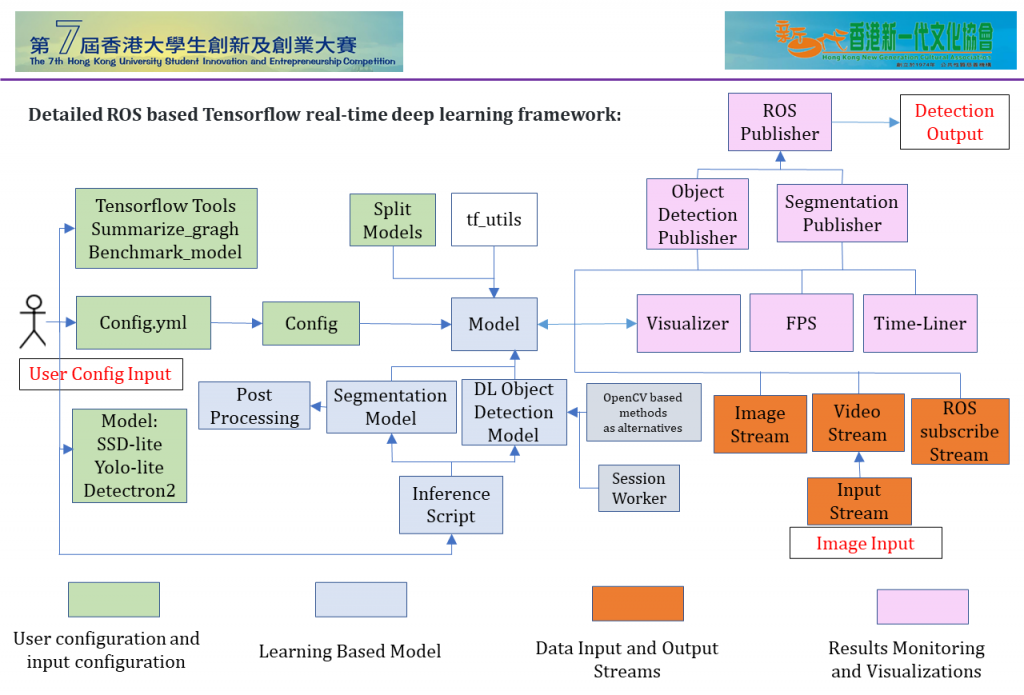
The second part of my work presents a framework for object detection and segmentation for robotic systems. It consists of user configurations and input configurations module, the learning-based model module, the data input and output streams module, and the results monitoring and visualizations module. It can realize accurate detection and segmentation with tracking ability for the UAV or UGV autonomous perception and navigation applications.
Sharing:
Thank you, Prof. Ben CHEN, my supervisor for letting me lead the UAV competition and various kinds of engineering projects. I faced different challenges when working on this project, such as UAV bridge inspections and UAV autonomous explorations, but at the same time, I came up with many innovative ideas too. To all students who want to participate this competition in the future, just follow your passion and do not give up!
