The 2021 Professor Charles K. Kao Student Creativity Awards
Project: Teleoperated MRI-Compatible Needle Insertion Robot
Awardee: LIN Kwan Kit
Award: (Undergraduate Individual) First Runner-up & Special Award
Supervisor: Prof. Bernard CHENG
Project Short Description:
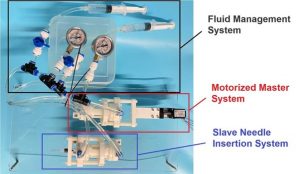
The teleoperated MRI-Compatible Needle Insertion Robot is a system that motorizing an MRI-Compatible Duo-Acting Hydraulic System to perform precise real-time needle-based procedure inside an MRI scanner. The Duo-Acting Hydraulic System can transmit pressure from one side to the other with fluid quickly, accurately and stably. The pressurised rolling diaphragms can push and pull the pistons simultaneously to achieve motion transmission. The Hydraulic System has improvements in stability and cost with a double glass ball bearing design and silicone rolling diaphragm. By motorizing the system, the precise motion of an MRI unsafe linear actuator can be transmitted to the MRI safe needle insertion system to perform the precise real-time needle-based procedure. The robot can be controlled by a computer with data input or a joystick to achieve teleoperating. With this robot, the surgeon can perform the operation inside the control room and check the real-time result. The safety, accuracy, time cost and economic cost of the operation can be improved with this robot.
Sharing:
| The most challenging part of this project is the trial-and-error process. Same as many researches, the ideal design might sound very good and feasible but the actual result is not. I had to learn from all the mistakes and design something new to improve them again and again. Thanks to my supervisor Prof. CHENG Shing Shin and his research team, their advice, technical support and encouragement had helped me a lot. Winning the prize has strengthened the affirmation of my ability and makes me more interested in the field of research and design. |  |