Congratulations to Dr. Jialin Jiang, PhD graduate of Professor Li Zhang, for winning the Best Paper Award at the 2024 International Annual Conference on Complex Systems and Intelligent Science (CSIS-IAC)!
Awardees: Dr. Jialin Jiang & Professor Li Zhang
Paper Title: Automatic Navigation and Real-time Pattern Planning of Microrobot Swarm Based on Deep Learning Algorithm
Abstract:
Microrobots have shown great application potential in biomedical field. However, the tasks one single microrobot can undertake are highly limited due to the small size. As an import subfield of robotics, swarm robotics may be able to provide a method to promote the capabilities of microrobots in practical applications such as targeted delivery and therapy. A microswarm possesses larger volume and more diverse functions, and reconfigurable microswarms can adapt to various working environments. However, current swarms lack the intelligence to adjust their distribution and motion autonomously during navigation. To systematically study the autonomy issue of microswarms, we have proposed a framework that defines different autonomy levels for environment-adaptive navigation of microswarms and designed control strategies for each level. Real-time swarm pattern distribution in unstructured environments is required to achieve high-level autonomy and a deep-learning model is formulated to provide optimal swarm morphologies. This work explores computational intelligence of microswarms, and enables adaptive and autonomous navigation of reconfigurable swarms in unstructured environments.
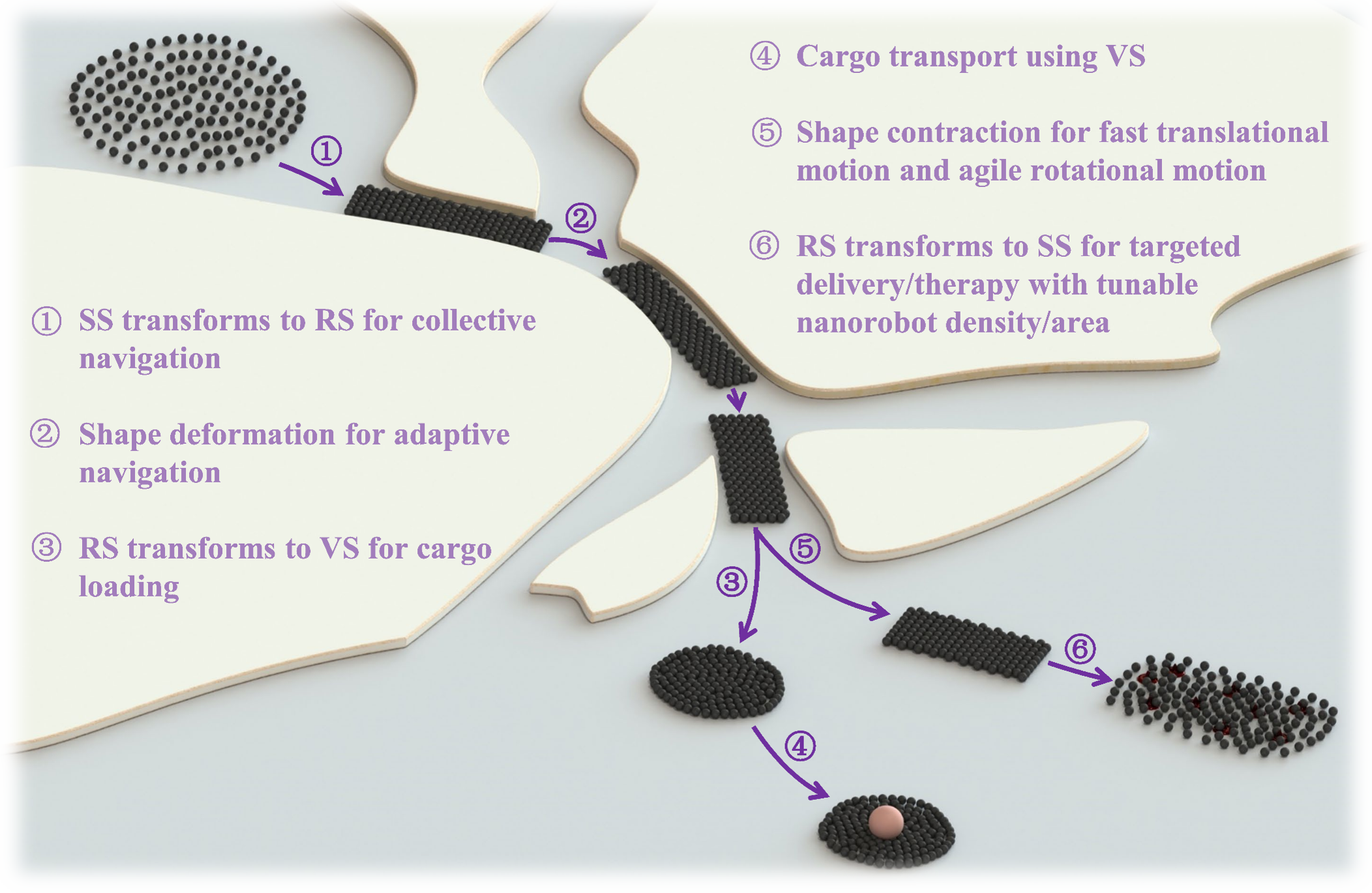
Diagram of the environmental adaptive navigation of microswarms. Under the actuation of dynamic magnetic fields, the nanoscale Fe3O4 particles tend to form different swarm patterns. The proposed deep learning-based pattern planning module provides the reference swarm distribution. After the navigation, the swarm can be triggered to transform for various tasks including manipulation, delivery, and targeted therapy.
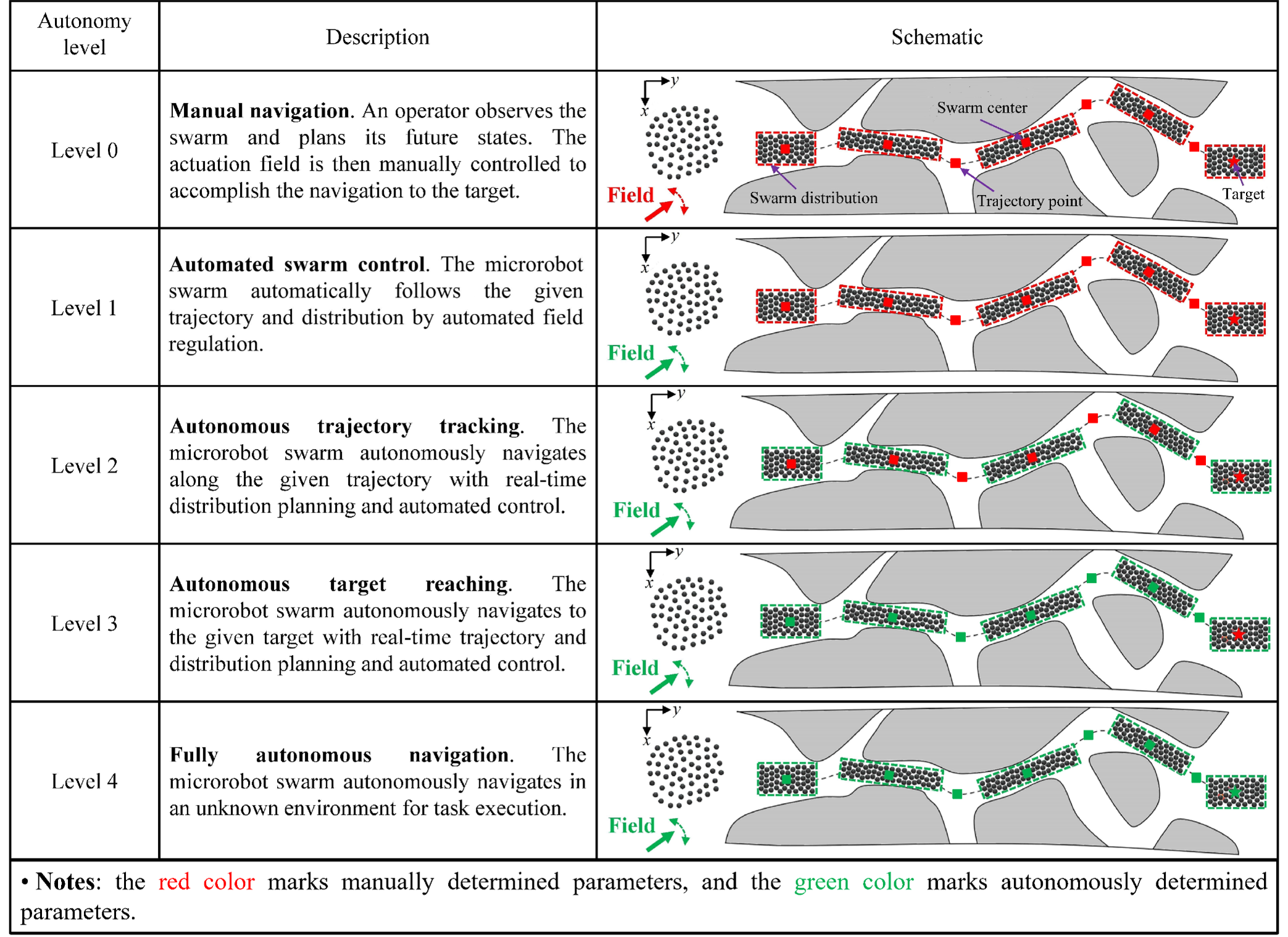
The framework we proposed to define the autonomy levels of the navigation systems of microswarms. From Level 0 to Level 4, the autonomy level increases accordingly. At Level 0, all the control efforts are decided by human operators; at Level 4, we expect full autonomy for microswarms to navigate and explore unknown environments with the assistance of pattern planning module, pattern control module, and path planning module.
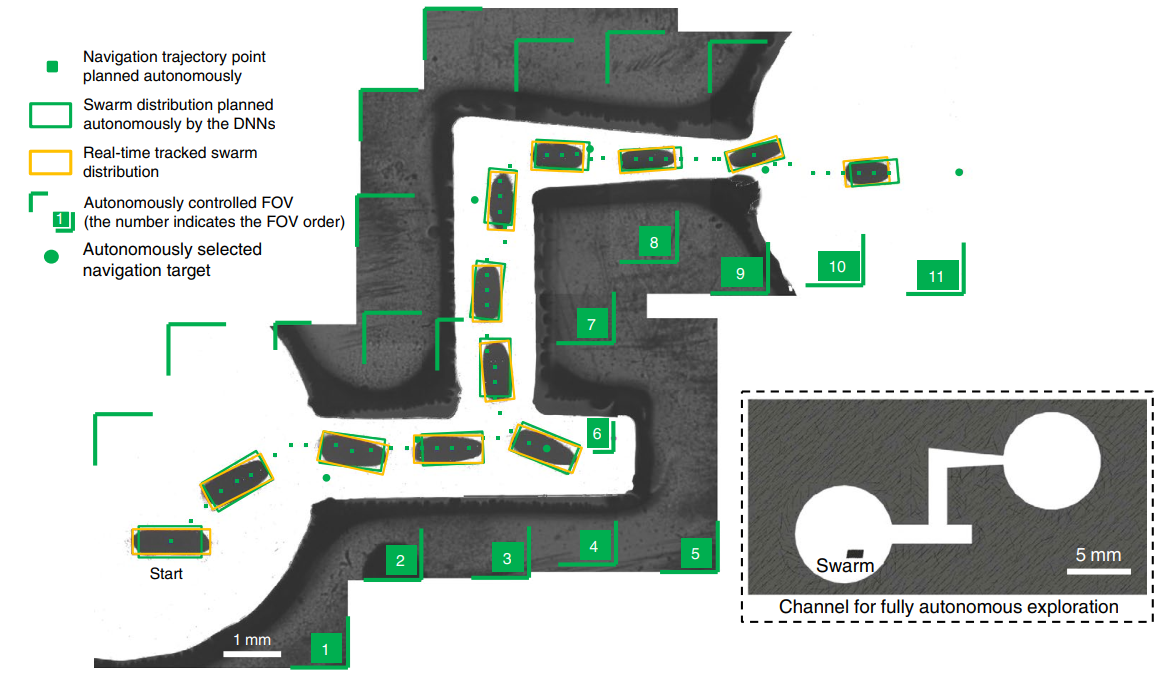
Experimental results showing the navigation process with autonomy Level 4.

Dr. Jialin Jiang attended the conference in Guangzhou, China.
Learn more about the conference: Click here!